|

Yves Gélinas On Self-Steering
By Yves Gélinas
This article
is reproduced
from Sailing Canada No 50, May 1988. It was first published in French in
Canada in La Revue maritime l'Escale No. 10 1985 and in France, in Loisirs
Nautiques no. 185, 1987
When he began making plans to
sail alone around the world, Yves Gélinas wanted more in a steering system
than was offered. After a year of work he had a piece of equipment which
matched his expectations
 On
May 9, 1983, on board the sloop Jean-du-Sud, an Alberg 30 (hull #399
), I completed a 28,000 mile single-handed circumnavigation from Saint-Malo,
France, to Gaspe, Quebec, by way of the Roaring Forties and Cape Horn. It
was my personal participation in the celebration of the 450th anniversary of
the first voyage of Jacques Cartier to Canada. On
May 9, 1983, on board the sloop Jean-du-Sud, an Alberg 30 (hull #399
), I completed a 28,000 mile single-handed circumnavigation from Saint-Malo,
France, to Gaspe, Quebec, by way of the Roaring Forties and Cape Horn. It
was my personal participation in the celebration of the 450th anniversary of
the first voyage of Jacques Cartier to Canada.
In the
282 sailing days of my voyage, I did not steer Jean-du-Sud more than
one hour. My boat stayed on course with the aid of the self-steering system
which I designed, through the seas and gales of the Roaring Forties and in
all other strengths of wind, even under spinnaker, square before a very
light breeze. If there was enough wind to keep the sails full, there was
enough for the self-steerer. It even survived two knock-downs and a 360°
capsize which dismasted Jean-du-Sud. Under jury rig, it was still
steering!
I had
been thinking about the design of a wind-operated self-steering system for
as long as I had been cruising under sail: I have always considered that
there were more interesting things to do than be stuck at the helm.

 Sailing
historians generally credit the French marine artist Marin-Marie for the
first solution to this problem, in 1939: the main rudder of his pinnace Arielle was lashed, while a small auxiliary rudder, controlled by a
vane, kept the boat on course. With the aid of this system, Marin-Marie was
the first single-hander to
cross the Atlantic under power. Sailing
historians generally credit the French marine artist Marin-Marie for the
first solution to this problem, in 1939: the main rudder of his pinnace Arielle was lashed, while a small auxiliary rudder, controlled by a
vane, kept the boat on course. With the aid of this system, Marin-Marie was
the first single-hander to
cross the Atlantic under power.
 This
auxiliary rudder self-steerer is still in use today (Hydrovane, Auto-Helm, RVG...). I tried it, and I found that its action is slow and its efficiency
decreases as the seas increase. It is more difficult, but also more
efficient to maintain a yacht on course with its own rudder. This
auxiliary rudder self-steerer is still in use today (Hydrovane, Auto-Helm, RVG...). I tried it, and I found that its action is slow and its efficiency
decreases as the seas increase. It is more difficult, but also more
efficient to maintain a yacht on course with its own rudder.
 If
the rudder is outboard, the problem can still be solved relatively easily:
in the fifties, an unknown person thought of mounting a small trim-tab, like
an airplane flap, on the trailing edge of a rudder. Controlled by an
average-size windvane on the same axis, this flap supplies the energy
required to move the rudder. It is the simplest of all systems. Bernard Moitessier has successfully used it on all of his boats. If
the rudder is outboard, the problem can still be solved relatively easily:
in the fifties, an unknown person thought of mounting a small trim-tab, like
an airplane flap, on the trailing edge of a rudder. Controlled by an
average-size windvane on the same axis, this flap supplies the energy
required to move the rudder. It is the simplest of all systems. Bernard Moitessier has successfully used it on all of his boats.
When
the rudder-stock passes through the hull, the problem is more complex; and
Jean-du-Sud, like most other modern cruising yachts, happens to have
such a rudder.
  For
the first single-handed trans-Atlantic race, in 1960, Francis Chichester
replaced the mizzen of his Yawl Gipsy-Moth with a big canvas
windvane linked to the tiller with control lines. The force required to move
the tiller called for a very large vane, which Chichester had to reef as the
wind increased. For
the first single-handed trans-Atlantic race, in 1960, Francis Chichester
replaced the mizzen of his Yawl Gipsy-Moth with a big canvas
windvane linked to the tiller with control lines. The force required to move
the tiller called for a very large vane, which Chichester had to reef as the
wind increased.
 Blondie
Hasler had a better idea. He made use of the energy produced by the movement
of his Blondie
Hasler had a better idea. He made use of the energy produced by the movement
of his folkboat Jester
through the water. A vertical oar blade was planted in the water
behind the boat. When a vane rotated this blade around a vertical axis, like
a rudder, the flow of water pushed it sideways with a considerable force. Hasler used this force by connecting the blade to the tiller through a
quadrant and control lines. He called this system "Servo-Pendulum". This
system produced a first generation of commercial self-steerers.
folkboat Jester
through the water. A vertical oar blade was planted in the water
behind the boat. When a vane rotated this blade around a vertical axis, like
a rudder, the flow of water pushed it sideways with a considerable force. Hasler used this force by connecting the blade to the tiller through a
quadrant and control lines. He called this system "Servo-Pendulum". This
system produced a first generation of commercial self-steerers.
 I
believe it was the French engineer Marcel Gianoli who thought of mounting
the vane (of the self-steering system for Eric Tabarly's 1986 OSTAR trimaran
Pen-Duick IV) on an almost horizontal axis (instead of vertical).
This increased the power and sensitivity of the windvane considerably and a
second generation of servo-pendulum self-steerers was created. Some of them
are still popular to-day (Aries, Monitor, Fleming Sailomat...). I
believe it was the French engineer Marcel Gianoli who thought of mounting
the vane (of the self-steering system for Eric Tabarly's 1986 OSTAR trimaran
Pen-Duick IV) on an almost horizontal axis (instead of vertical).
This increased the power and sensitivity of the windvane considerably and a
second generation of servo-pendulum self-steerers was created. Some of them
are still popular to-day (Aries, Monitor, Fleming Sailomat...).
Since
then, there had been no major improvement to windvane technology. All of the
existing wind-operated self-steering systems on the market use one or a
combination of these solutions. At the time of preparing for my own
circumnavigation, I had not seen a system which I considered capable of
taking me around the world with pride or confidence. To me, they all seemed
clumsy add-ons with far too much metal. I felt Jean-du-Sud would not
appreciate it if I hung a drilling rig on its transom.
In
1975, I started to work on a self-steering system that would be more
integral to Jean-du-Sud.. I was spending the summer in Martha's
Vineyard waters and I used the small-boat carpentry shop of Peter and Robbie
Eldridge to conduct my first experiments. I did not dream, then, about
sailing alone around the world, but I already felt that Jean-du-Sud,
my only home in the last few months, would take me far and needed a
self-steering system I could trust. I had already built and tried two
experimental systems and I wanted to build a final one.
I decided
that Jean-du-Sud's system would have a Hasler-type servo-pendulum and
a Gianoli-type horizontal- axis windvane. It would be installed permanently
and become an integral part of the boat. Regardless of the strength of the
wind or the state of the sea, I would not have to worry about its structure
or performance. It would be discreet and would not spoil the pleasant lines
of my boat. It would be sensitive enough to steer on any point of sail as
soon as there is enough wind to move the boat. Finally it would be as
inexpensive and easily repaired as possible.
 From
then on, I always kept the problem in the back of my mind, even when I was
not working at it actively. I can say now that I worked the equivalent of
more than one year, on a full-time basis, either at the drawing board or at
building and testing prototypes. If my application of the principles
discovered by Hasler and Gianoli is better, it is probably not because I am
more gifted, but because I worked at it longer. From
then on, I always kept the problem in the back of my mind, even when I was
not working at it actively. I can say now that I worked the equivalent of
more than one year, on a full-time basis, either at the drawing board or at
building and testing prototypes. If my application of the principles
discovered by Hasler and Gianoli is better, it is probably not because I am
more gifted, but because I worked at it longer.
Throughout
the whole design period, I had this constant preoccupation with simplifying
the device. By eliminating useless metal, I achieved the advantages of less
weight, simpler operation and cheaper fabrication.
In
order to install a wheel steering system in a yacht, you have to punch a
hole through its cockpit sole. To really integrate Jean-du-Sud's
self- steering system to the hull, I did not hesitate to drill a hole
through its transom for a horizontal tube. Inside this tube, rotates another
tube. Near its aft end is welded a smaller vertical tube holding the stock
of the servo-pendulum; at its forward end, inside the lazarette, a steering
quadrant is bolted. I can't imagine a simpler or more robust installation.
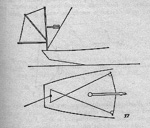
The
main problem to solve, in designing this type of self-steering system, is to
transform the vertical movement of a connecting rod coming from a vane, to
the rotary movement of a servo-pendulum blade. The existing systems use
gears, heavy and expensive to manufacture, or rods and joints, lighter but
more fragile.
The
system I invented solves this problem with a single piece made with bent
stainless steel rod: first two 90° elbows form a crank (4) that transforms
the vertical movement of the rod to rotary, then in the form of a horizontal
"Z" (5) . The central branch of the "Z" goes through a slot (6) cut
through the
stock of the servo-pendulum blade.
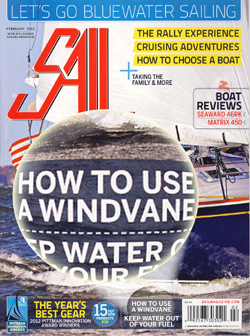
 To set
the course, the turret (2) is oriented so that the apparent wind hits the
vane (I) on its edge. As long as the boat stays on course, the wind pressure
is equal on both sides of the vane and it stays vertical. Linked with a
crank and a connecting-rod assembly (3) to the bent rod, it maintains its
"Z" part (5) in a vertical plane. The slot in the stock of the blade is thus
kept in the fore-and-aft plane, so the servo-pendulum blade stays vertical. To set
the course, the turret (2) is oriented so that the apparent wind hits the
vane (I) on its edge. As long as the boat stays on course, the wind pressure
is equal on both sides of the vane and it stays vertical. Linked with a
crank and a connecting-rod assembly (3) to the bent rod, it maintains its
"Z" part (5) in a vertical plane. The slot in the stock of the blade is thus
kept in the fore-and-aft plane, so the servo-pendulum blade stays vertical.
As
soon as the yacht wanders off course, the wind tilts the vane. (The axis of
the vane is not quite horizontal, so this tilt is proportional to the
variation in course.) The crank and connecting-rod assembly (3) and the
handle (4) rotate the "Z." Part (5) which is no longer in the plane of the
boat's movement, but makes with it an angle also proportional to the course
variation. As it passes through the slot (6), the "Z" rotates the stock and
the blade, which is pushed side-ways by the movement of the boat through the
water and tilts until it is once again in the plane of the "Z". The tilt of
the servo-pendulum and the rotation of the horizontal tube
are thus
proportional to the tilt of the vane and course variation. A quadrant bolted
at the forward end of the horizontal tube, inside the lazarette (8), and
connected to the tiller or wheel through control lines, turns the rudder to
an angle proportional to the course variation.
I made
an effort to analyze all stress-points and to conceive a very strong
mechanism; yet one capable of coming apart if a load above normal is
imposed.
The
servo-pendulum blade is held locked to its stock by an elastic link that
keeps two notches in its mount in contact with a pin on both sides of the
stock (10). If the blade hits an obstacle, this assembly comes apart instead
of breaking the blade or bending its stock.
I made
two vanes: a large one, very light, for increased performance in light air
and a small and stronger one, for total dependability in heavy weather. I
change to the small vane when I take a first reef.
This
third generation system offers a double integration : it is not only more
integral to the hull, it also integrates all steering modes : if I want to
use an electric autopilot, I simply remove the vane and connect the forward
end of the rod, which I made to emerge in front of the quadrant, to a small
electric autopilot, which drives the servo-pendulum. Since this autopilot
supplies only the information (the servo-pendulum provides the power), the
smallest autopilot on the market can steer even a large boat with a minimum
expense of power.
 For steering manually,
this control rod can be driven through light lines that provide remote power
steering. For steering manually,
this control rod can be driven through light lines that provide remote power
steering.
Before I left for my voyage around the world, I had already put ashore the
factory-installed wheel steering, the tiller being all I need for the few
times I would need to steer manually
I must
admit I was a little worried about possible wear of the rod as it passes
through the slot and rubs stainless on stainless. This was the only
criticism a mechanical engineer had made of my system. I was pleasantly
surprised, after 28,000 miles, to find no apparent wear.
Suite: How does CapeHorn compare
with Monitor? |